技术规格
特性
| 使用环境 | Indoor/Outdoor
|
| 图像传感器技术 | Global Shutter |
| 理想范围 | 0.3m to 3m |
深度
| 深度技术 | 立体 |
| 深度视场(FOV) | 87°×58° |
| 最大分辨率下的最小深度距离(Min-Z) | ~28cm |
| 深度输出分辨率 | Up to 1280 × 720 |
| 深度精度 | 在2米处<2% |
| 深度帧率 | Up to 90 fps |
RGB
| RGB画面分辨率 | 1920 × 1080 |
| RGB帧速率 | 30 fps |
| RGB传感器技术 | Rolling Shutter |
| RGB传感器FOV(H×V) | 69° × 42° |
| RGB传感器分辨率 | 2 MP |
主要组件
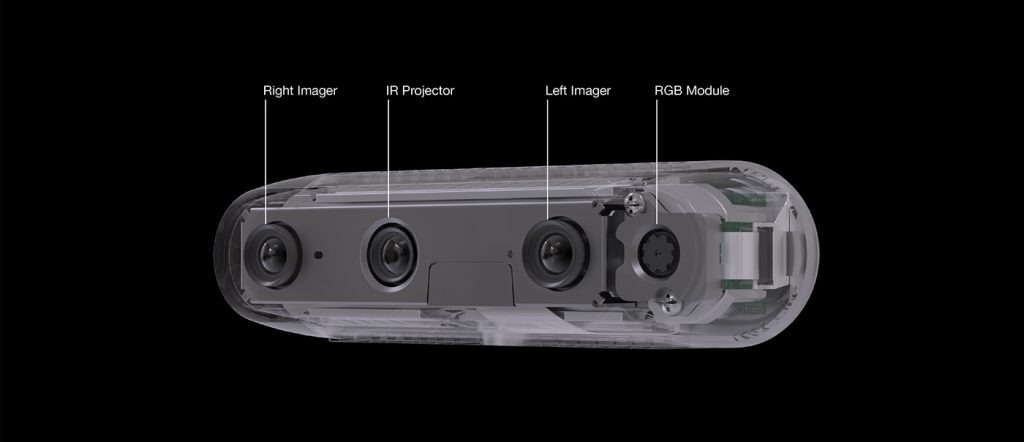
| 相机模块 | 英特尔RealSense模块D430+RGB摄像头 |
| 视觉处理器板 | 英特尔RealSense视觉处理器D4 |
物理
| 外形因素 | 相机周边设备 |
| 长×深×高 | 90 mm × 25 mm × 25 mm |
| 连接器 | USB-C3.1 Gen 1 |
| 安装机制 | 一个1/4-20 UNC螺纹安装点 两个M4螺纹安装点 |
Intel® RealSense™深度摄像头D435是一个立体解决方案,为各种应用提供高质量的深度。它的视场宽广,非常适合机器人或增强型和虚拟现实等应用,在这些应用中,尽可能多地看到场景是非常重要的。这款小尺寸的相机射程可达10米,可以轻松地集成到任何解决方案中,并配有我们的英特尔RealSense SDK 2.0和跨平台支持。

D435继续我们对开发尖端视觉传感产品的承诺。将英特尔模块和视觉处理器结合在一起,形成一个小尺寸的解决方案,是开发和快速创建产品的理想选择。与高度可定制的软件相配,D435提供了一个低成本的解决方案,它既轻巧又强大,能够开发出能够理解周围环境并与之互动的下一代传感解决方案。

D435的宽视场和全局快门传感器的结合使其成为机器人导航和物体识别等应用的首选解决方案。全局快门传感器提供了极大的低光灵敏度,使机器人可以在关灯的情况下进行导航。





