该方案由Smart 高性能室内移动机器人平台 +Kinova Jaco² 轻量协作机械臂 + 激光雷达(实现导航,避障,路径规划) +IMU(导航时确定的姿态及运动的方向)+ 视觉传感器 + 高性能移动工作站(ROS 主站)+ROS 操作软件几个部分组成。
该系统是一个可供远程操作的高性能双臂协作移动抓取平台解决方案。机器人可通过高速无线网络和控制进行通讯,实现自主定位和导航,自动完成机械手臂路径规划并抓取指定物体。集成的 硬件都有现成的 ROS(Robot Operating System)驱动,可以通过标准的ROS消息交换信息。系统各方面保持高度兼容,且能够使用 ROS 提供的大量应用程序。
机器人的软件包括导航系统以及用于任务规划,提供定制化 ROS 系统及组件ROS驱动、完全配置的MoveIt 运动规划软件包、自主导航软件包、提供地图生成与定位软件。该套系统可以用于双臂交互及协作、移动抓取、遥操作机器人、服务机器人、移动仓储机器人等方面的研究和应用。
方案描述
该方案由Smart 高性能室内移动机器人平台 +Kinova Jaco² 轻量协作机械臂 + 激光雷达(实现导航,避障,路径规划) +IMU(导 航时确定的姿态及运动的方向)+ 视觉传感器 + 高性能移动工作 站(ROS 主站)+ROS 操作软件几个部分组成。
该系统是一个可供远程操作的高性能双臂协作移动抓取平台解决 方案。机器人可通过高速无线网络和控制进行通讯,实现自主定 位和导航,自动完成机械手臂路径规划并抓取指定物体。集成的 硬件都有现成的 ROS(Robot Operating System)驱动,可以 通过标准 的 ROS 消息交换信息。系统各方面保持高度兼容,且 能够使用 ROS 提供的大量应用程序。
机器人的软件包括导航系统以及用于任务规划,提供定制化 ROS 系统及组件 ROS 驱动、完全配置的 MoveIt 运动规划软件包、自 主导航软件包、提供地图生成与定位软件。该套系统可以用于双 臂交互及协作、移动抓取、遥操作机器人、服务机器人、移动仓 储机器人等方面的研究和应用。
适用产品
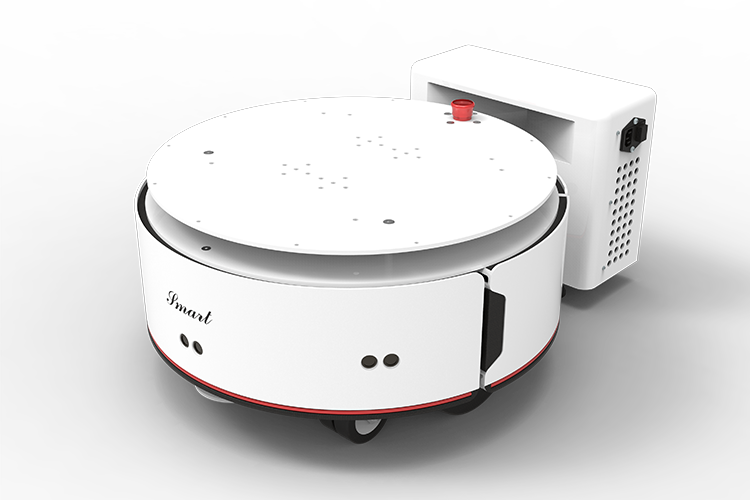
SMART
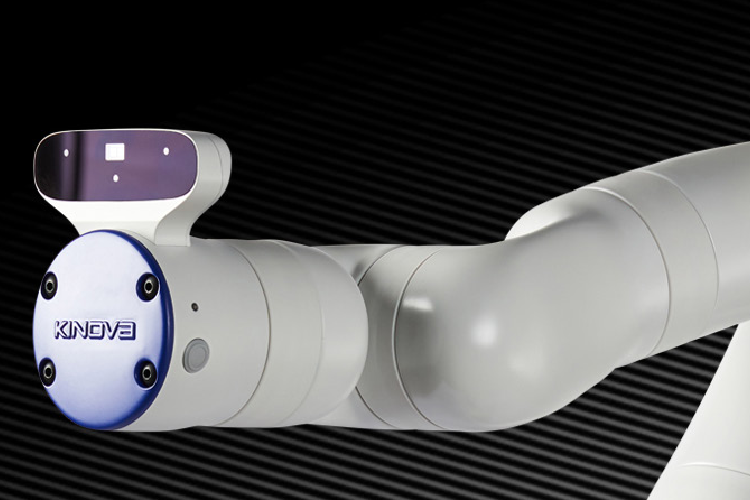
Kinova轻量协作机械臂
方案特点
方案组成

Smart+Kinova Jaco²
该方案由Smart高性能室内移动机器人平台+Kinova Jaco2轻量协作机械臂+激光雷达(实现导航、避障、路径规划)+IMU(导航时确定的姿态及运动的方向)+视觉传感器+高性能移动工作站+ROS操作软件几个部分组成。









