400-800-8820
Hi,欢迎来到景乘实业在线商城!
400-800-8820

无数据

无数据
无数据














支付方式: 在线支付 支付宝支付 微信支付
商品服务: 正品保障 增票速开 售后保障
备 注: 具体价格,请您联系客服咨询
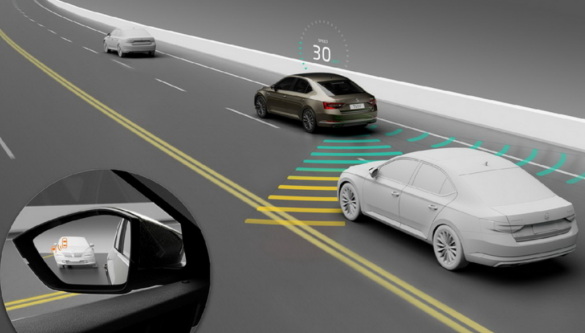
全新一代固态多线激光雷达
RS-LiDAR-M1 B3


|为你推荐
为无人驾驶车辆保驾护航
新鲜好货,给你惊喜



精选热点
SICK
玩智商
思岚
星秒
倍加福
基恩士
定制流程
用心服务客户,用专业成就品牌






下单付款
Order payment
产品需求
product demand
制定解决方案
Custom design
成为VIP客户
Become a VIP customer
仓库发货
Warehouse delivery
联系我们
CONTACT US
|大牌特惠
大牌放假
























|
|
|
卫星导航良好的体验
频道广场
惯性导航良好的体验

激光雷达良好的体验
光电传感器良好的体验
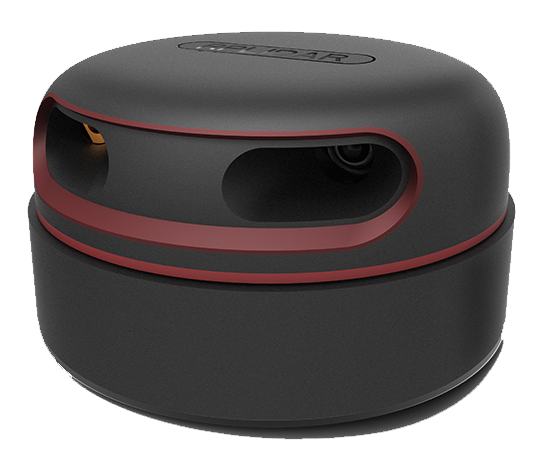
三维激光雷达
有效检测
光数据传输良好的体验
面阵相机良好的体验
多目相机良好的体验
视觉传感器良好的体验
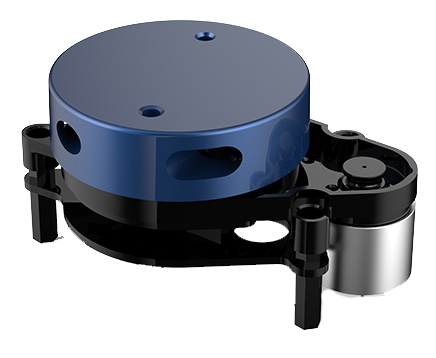
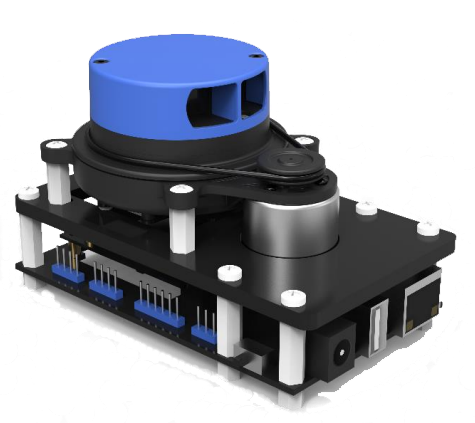
二维激光雷达
感应探索

精选品类
自动化常用产品

联系我们
固定电话:010-61590500
移动电话:15313019379
市场部邮箱:sales@jcsy-china.com
技术部邮箱:support@jcsy-china.com
地址:北京市怀柔区雁栖经济开发区雁栖路33号院1号楼103室


景乘实业公众号
景乘实业
微信智能客服