自动化生产中要想让机器准确的识别和定位到物体是提高生产效率的唯一方法,关于机械臂抓取和定位目前主要是通过机构光或者双目、TOF相机等先获取物件的3D坐标信息然后在建立模型,操作机械臂实现准确的定位和抓取。
自动化生产中要想让机器准确的识别和定位到物体是提高生产效率的唯一方法,关于机械臂抓取和定位目前主要是通过机构光或者双目、TOF相机等先获取物件的3D坐标信息然后在建立模型,操作机械臂实现准确的定位和抓取。
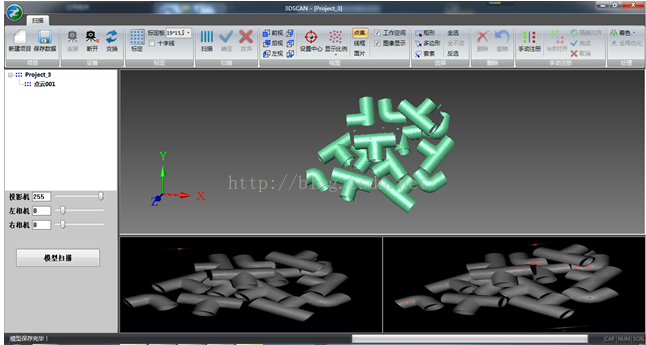
第一步:使用基于结构光或者双目或者TOF相机的方法获取到物体的被定位物体的三维点云
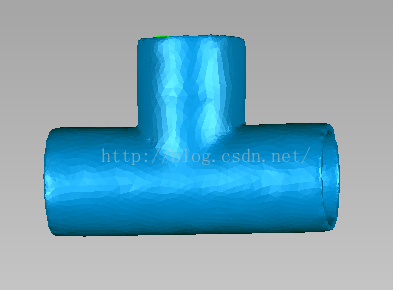
第二步:使用一个基准模型,这个基准模型可以是CAD文件、或者扫描之后的文件,格式可以是stl,obj,ply,等,主要是三维点
和法线数据。
第三步:有了基准模型和扫描出来的待定位的三维点,其原理就是使用模型上面的三维点的特征在扫描出来的点云中去匹配,
最终得到 模型到点云的三维变换矩阵[R,T]。
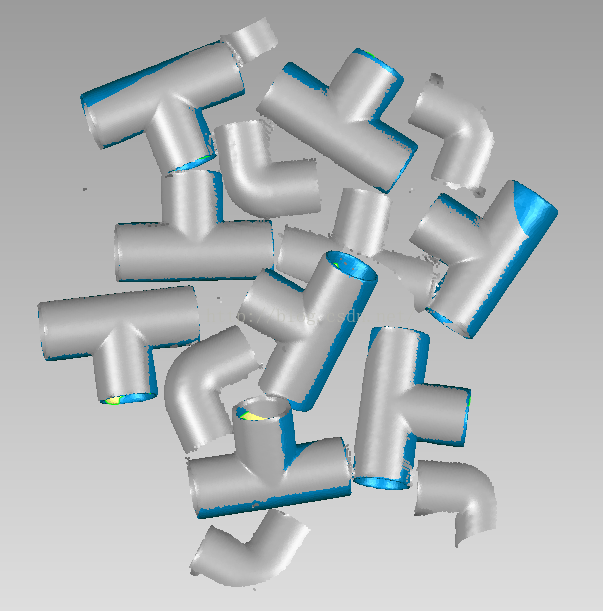
第四步:根据上面计算出来的[R,T],可以将模型转换到点云上去验证是否定位正确,如下图所示,蓝色表示变换到点云上的模型。
关于最后位置的确定:最后返给机器人的应该是一个定位点(X,Y,Z)和一个法向量(nx,ny,nz),定位点的计算,可以事先在模型上确定一个点和法线,然后将这个点和法线使用计算的[R,T]转换到点云上,至此点云匹配定位结束了,后面可以交给机器人来处理,至于机器人和三维点云直接的坐标转换关系就不是很难的问题了。









